 Global Navigation Satellite Systems (GNSS) have obtained a global consensus about their potential of supporting advanced location-based services which go far beyond the mere fixing of receiver position. Currently, the GPS system is the most used navigation system.
Global Navigation Satellite Systems (GNSS) have obtained a global consensus about their potential of supporting advanced location-based services which go far beyond the mere fixing of receiver position. Currently, the GPS system is the most used navigation system.
It has been designed in order to allow any terrestrial navigation device to receive at least four satellites, which is the minimum number of visible satellites necessary to fix a receiver position. Clearly this happens if the receiver is located in an open space, i.e. without any surrounding objects obstructing satellite visibility.
Satellite visibility is therefore a key aspect to determine the availability of the GPS services. For this reason, and even for improving the GPS accuracy, reliability, and integrity, some so-called augmentation systems have been defined. The augmentation approaches may include the combination of the GPS navigation information with the one achievable from other GNSS constellations, or other satellites.
The latter solution is referred to as satellite-based augmentation system, as it happens in the European Geostationary Navigation Overlay Service (EGNOS), in the Wide Area Augmentation System (WAAS), in the Multi-functional Satellite Augmentation System (MSAS), in the Geostationary Earth Orbit Augmented Navigation (GAGAN), etc. Other approaches, proposed to overcome the GPS coverage limitations, have been proposed and implemented. Occasional and small sized holes in the GPS coverage may be recovered quite easily by introducing inertial components in the GPS receiver architecture, along with specific signal processing based on an estimated customer mobility model, such as kalman filtering. This kind of solution may improve the receiver performance, but cannot help fixing the receiver position accurately when the lack of coverage is large, as it might happen indoor or within old cities with narrow streets and high buildings. This shortcoming has been addressed by other proposals, which include a deployment of a dedicated infrastructure. The beacon-based class of solutions is based on the adoption of pseudolites, which are dedicated transmitters which broadcast specific signals designed for navigation purposes in areas where the GPS coverage is missing. A further class of solutions consists of resorting to the so-called signals of opportunity (SoOP), which are radio frequency (RF) signals that are not designed for navigation purposes.
These proposals aim to extend the GPS navigation capabilities by combining the known position of the terrestrial infrastructure with some other information obtained by processing the received terrestrial signals through suitable algorithms based on the received signal strength indication (RSSI), the time of arrival/time difference of arrival (ToA/TDoA), and the angle of arrival (AoA) to determine the receiver position. Nevertheless, some impairments may affect the achievable performance. One of them is the multipath propagation, which causes a random magnitude and phase combination of the received signal replicas that get to the receiver from different directions, which is the origin of the so-called multipath fading. For navigation purposes the increased delay, random directions and power received may heavily affect the performance of the ToA, AoA, and RSSI techniques, respectively.
These problems are the motivation that has driven the research activity towards new techniques, both effective and easy to implement, able to extend the GPS coverage and navigation services in areas where most satellites are not visible and many people spend most of their time. In this paper we illustrate a lightweight technique, which includes most of the good properties of the approaches mentioned above, and avoids the most important technical shortcomings illustrated while preserving a satisfactory performance level.
This proposal will combine the GPS received signals with other signals transmitted by an existing terrestrial infrastructure, someway similarly to what happens in the SoOP approach, and also includes some dedicated navigation information, likewise pseudolite transmissions, but with a very small complexity. We also stress that our proposal does not combine a terrestrial positioning system with a satellite navigation system, is not an alternative to GPS, and is not tied to any particular terrestrial transmission system.
For the sake of clearness, and without any loss of generality, we will refer to a particular terrestrial technology selected for its pervasive diffusion, which is the IEEE 802.11 technology. We propose a solution by resorting to the IEEE 802.11 technology with a SoOP-like approach. Even if IEEE 802.11 networks were designed for the indoor environment, they have found a widespread application even outdoor to provide customers wideband data network services.
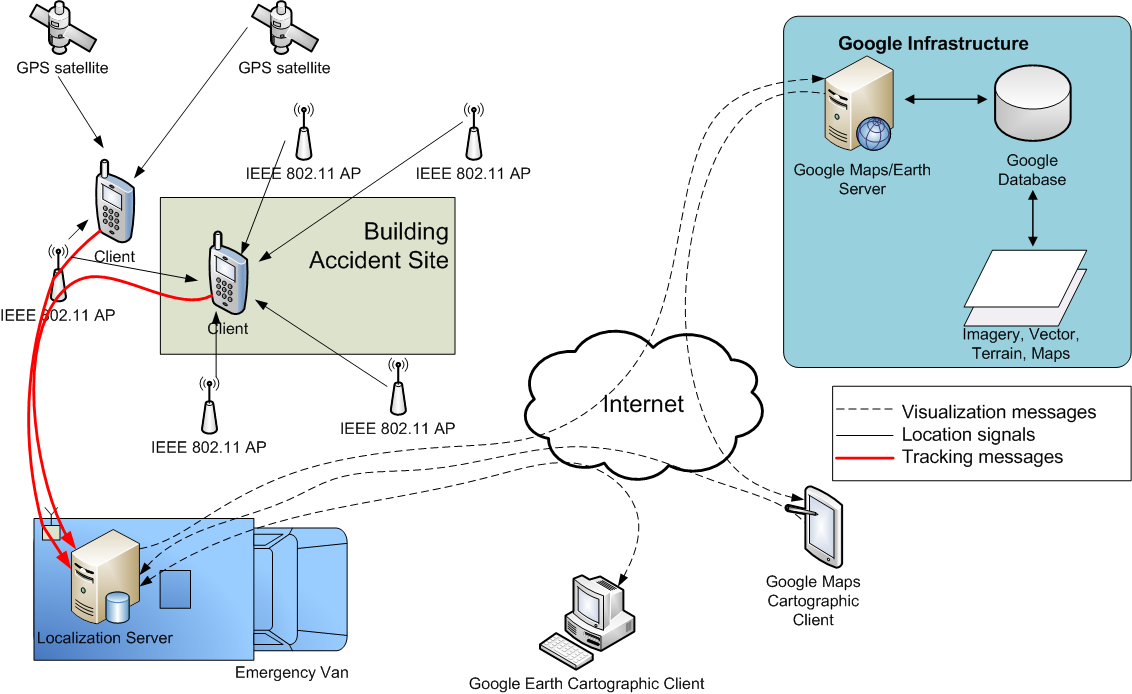
Today many so-called IEEE 802.11 hot-spots are currently available in all major cities. This pervasive diffusion is another reason to select IEEE 802.11 as the GPS terrestrial companion technology to illustrate our proposal. The basic idea is the following: if in a given time instant the number of visible GPS satellites is lower than four, our proposal allows integrating the set of visible satellites by some so-called virtual satellites in order to get the minimum number of satellites necessary to determine the four unknowns. This virtual satellite is implemented within the receiver estimation algorithm by using the proximity information received from a nearby AP, which broadcast its position within the peridodic beacon frames. Obtained experimental results are very promising: in 95% of times a solution is found, it is better than simply approximating the receiver with the AP position. This performance is compliant (and by far better) with the constraints imposed by FCC for locating terminals dialing 911 with handset-based techniques. Emergency scenarios represent a very convenient venue to apply the proposed solution.